AgentChord
AgentChord
From Reaction to Anticipation:
Proactive Failure Recovery through Agentic Task Graph for Robotic
Manipulation
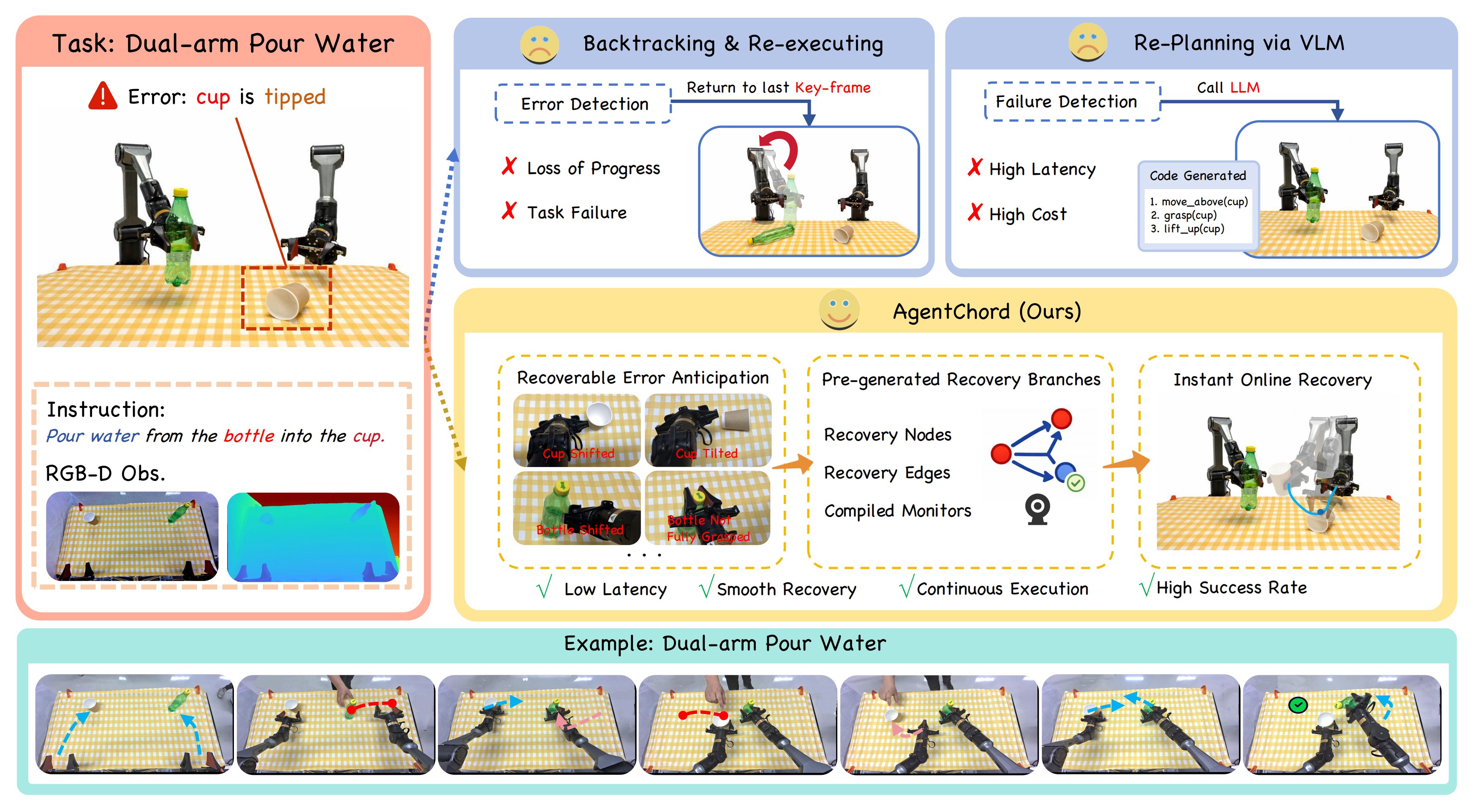
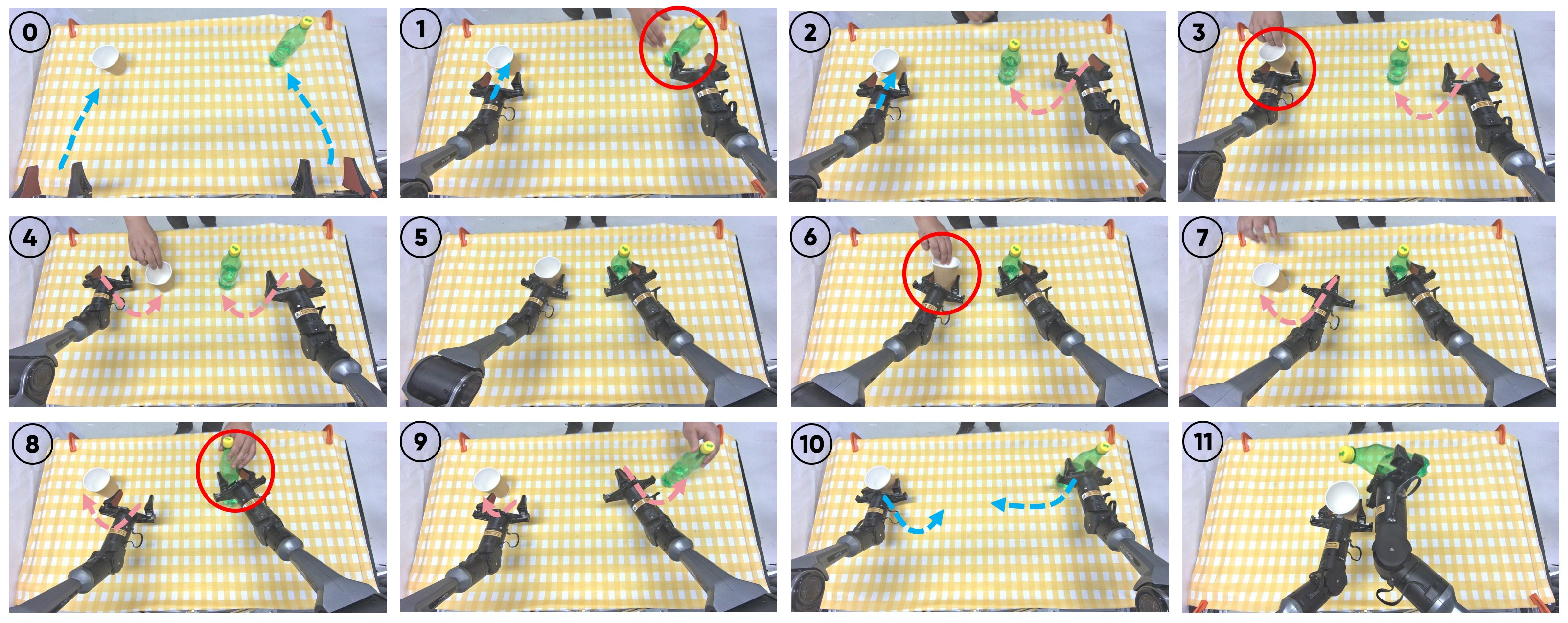
AgentChord prepares recovery branches before execution. During rollouts, compiled monitors trigger
the right transition immediately, avoiding repeated online re-planning when manipulation tasks are
disturbed.
Sheng Xu1
Ruixing Jin1
Huayi Zhou1
Bo Yue1
Guanren Qiao1
Yueci Deng1
Yunxin Tai2
Kui Jia1,2
Guiliang Liu1,3,*

1 The Chinese University of Hong Kong, Shenzhen

2 DexForce Technology

3 Shenzhen Loop Area Institute
* Corresponding author
Abstract
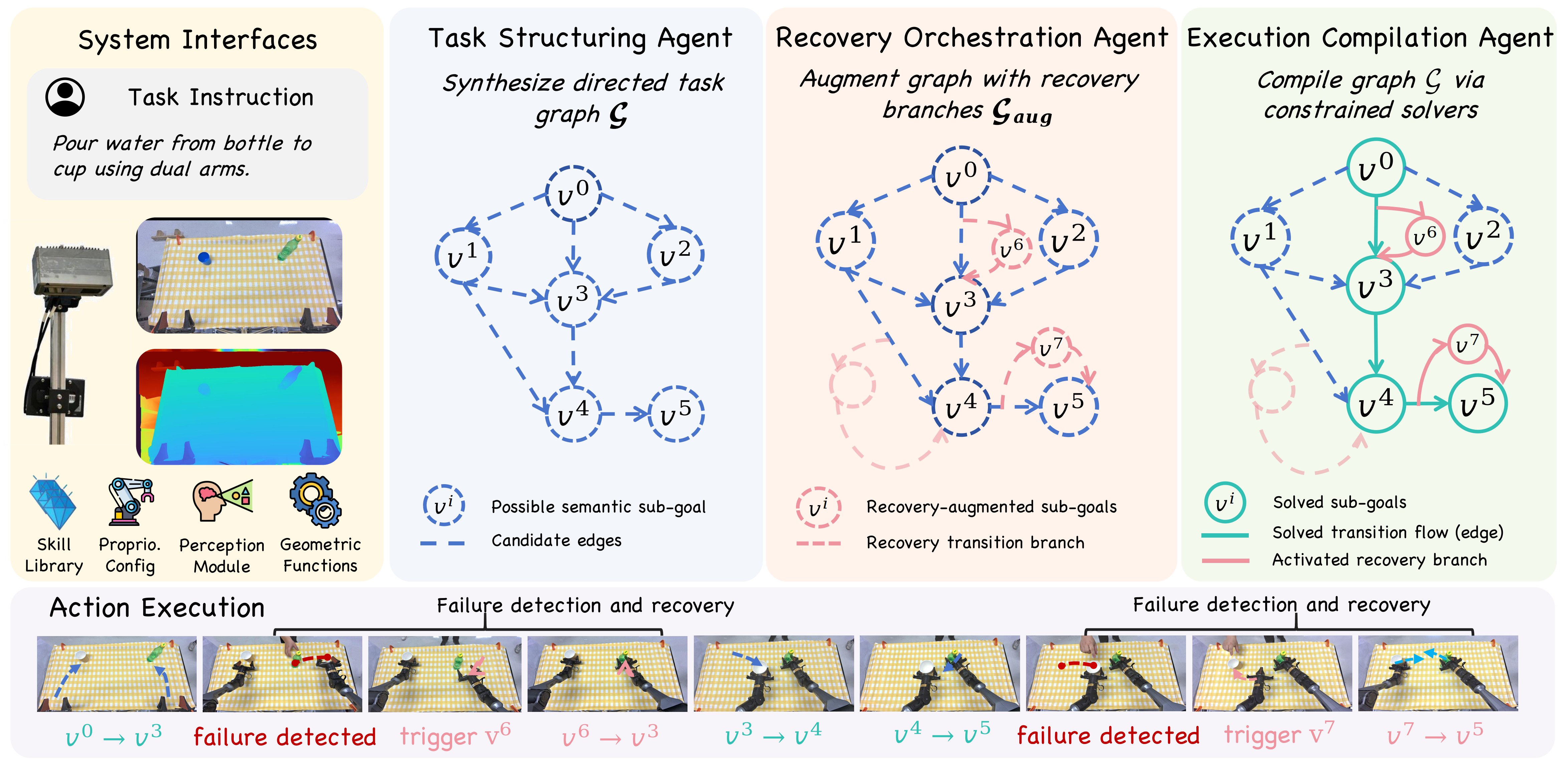
AgentChord treats a manipulation task as a directed task graph, then enriches that graph before execution
with failure-specific recovery branches. A composer builds semantic sub-goals, an arranger anticipates
likely failures and inserts corrective routes, and a conductor compiles the graph into executable,
interruptible transitions with low-latency monitors.
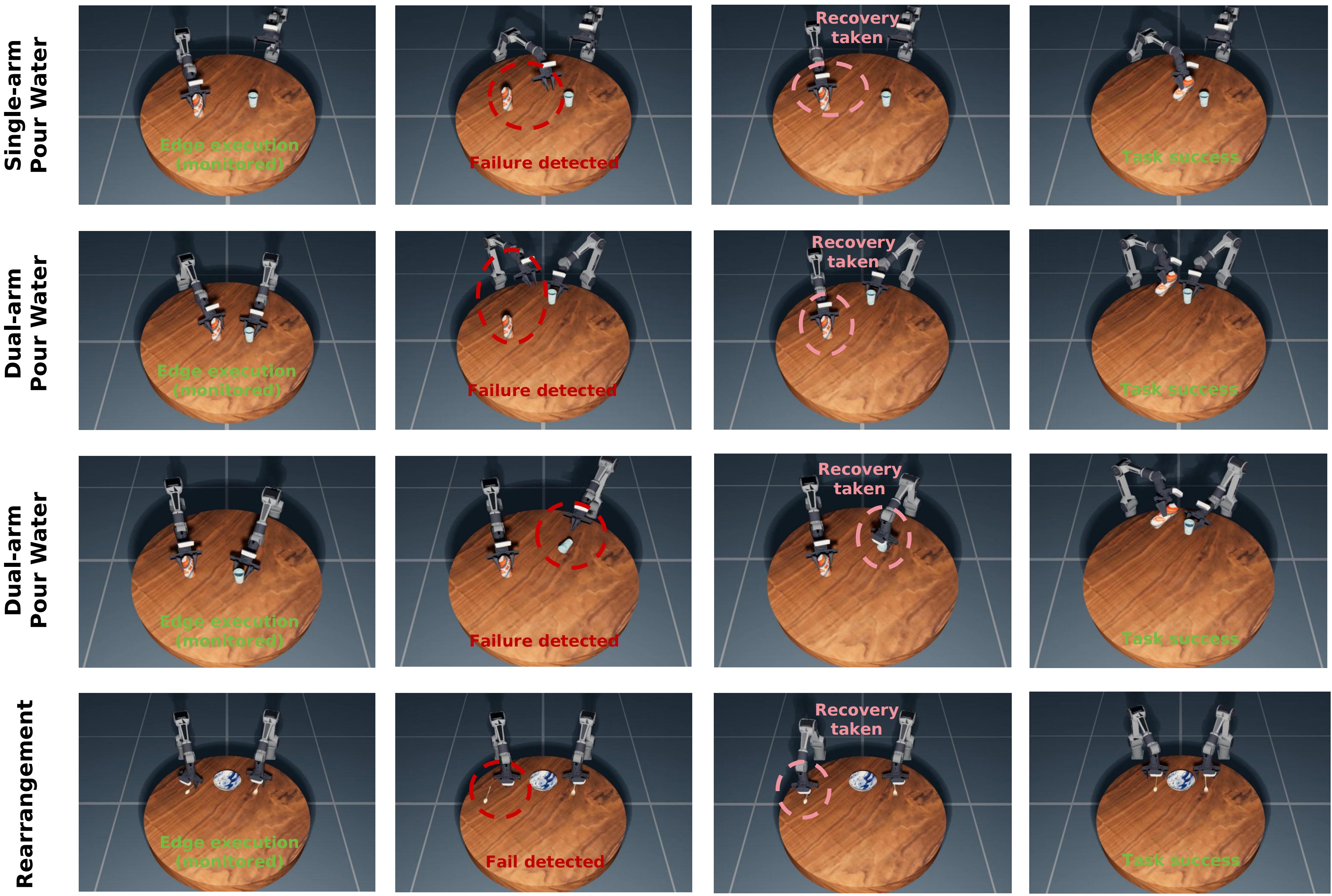
During execution, the robot evaluates multimodal geometric and gripper-state signals. When a persistent
deviation is detected, AgentChord immediately switches to the corresponding pre-compiled recovery branch
instead of re-planning from scratch or backtracking through the task.
Contributions
-
Recovery-augmented task graph.
A unified graph representation for task structuring, execution compilation, failure anticipation, and
online recovery.
-
Forward-moving recovery.
Anticipated recovery branches are filtered so they preserve task progress and avoid regressive resets.
-
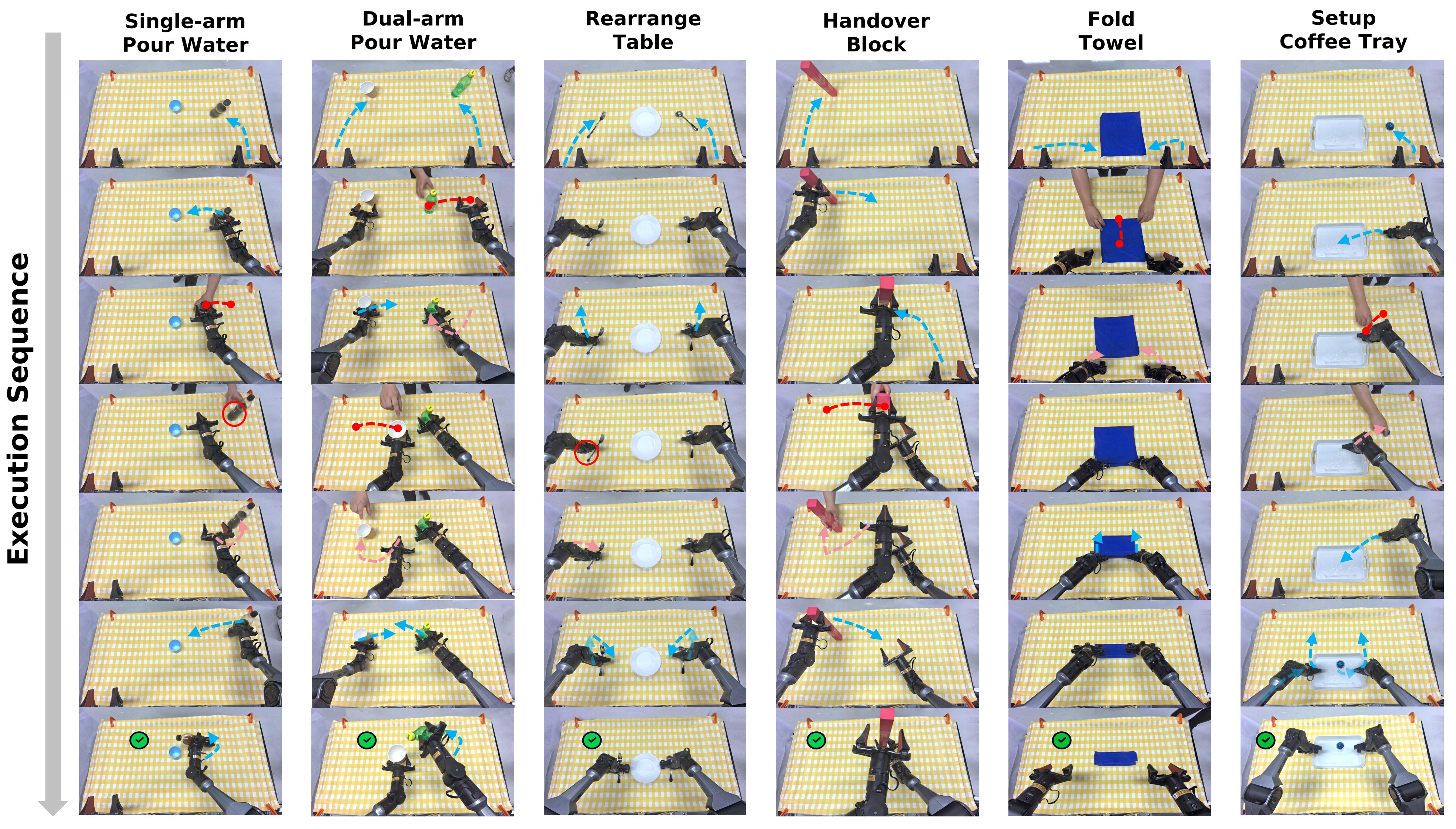
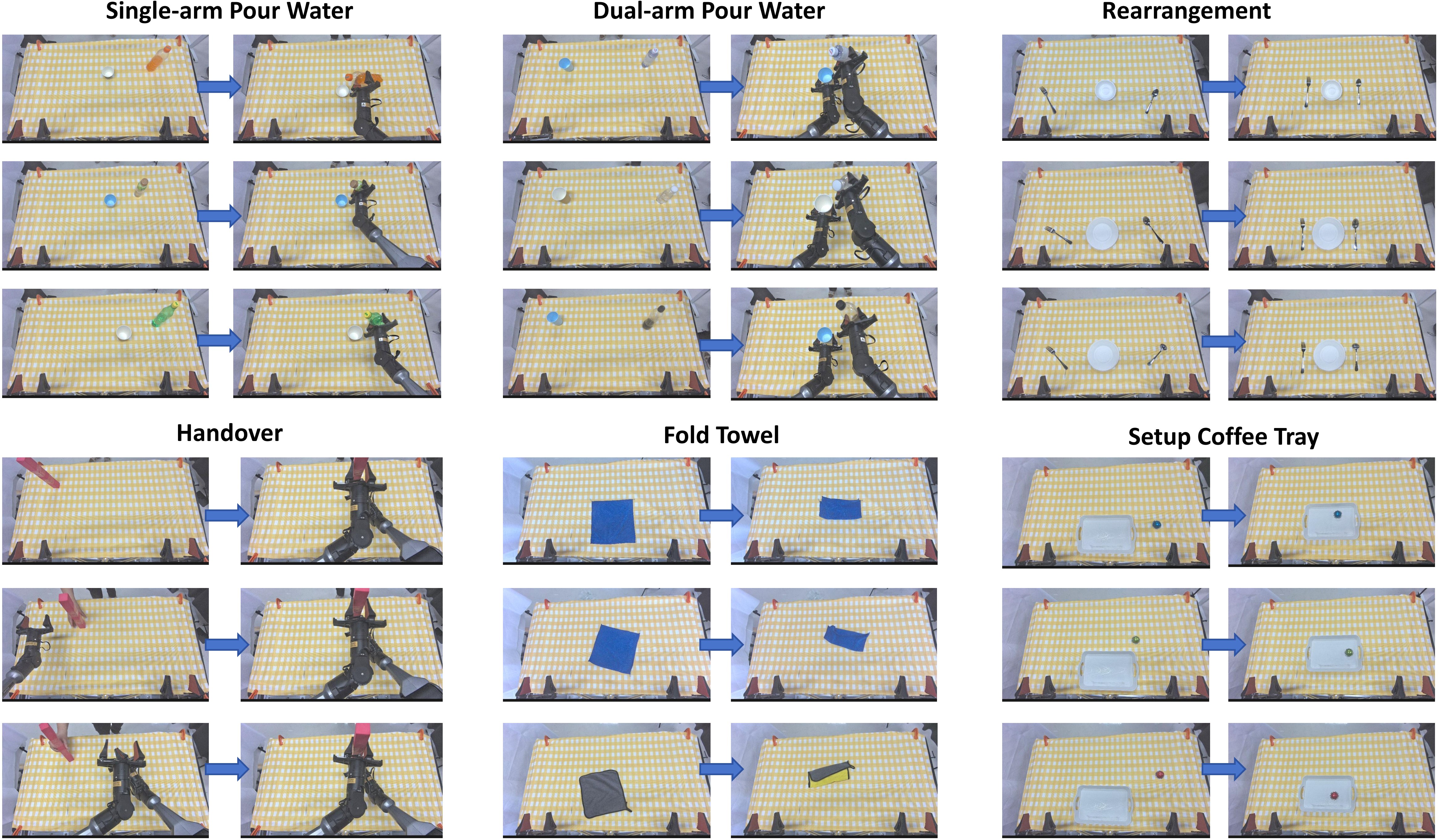
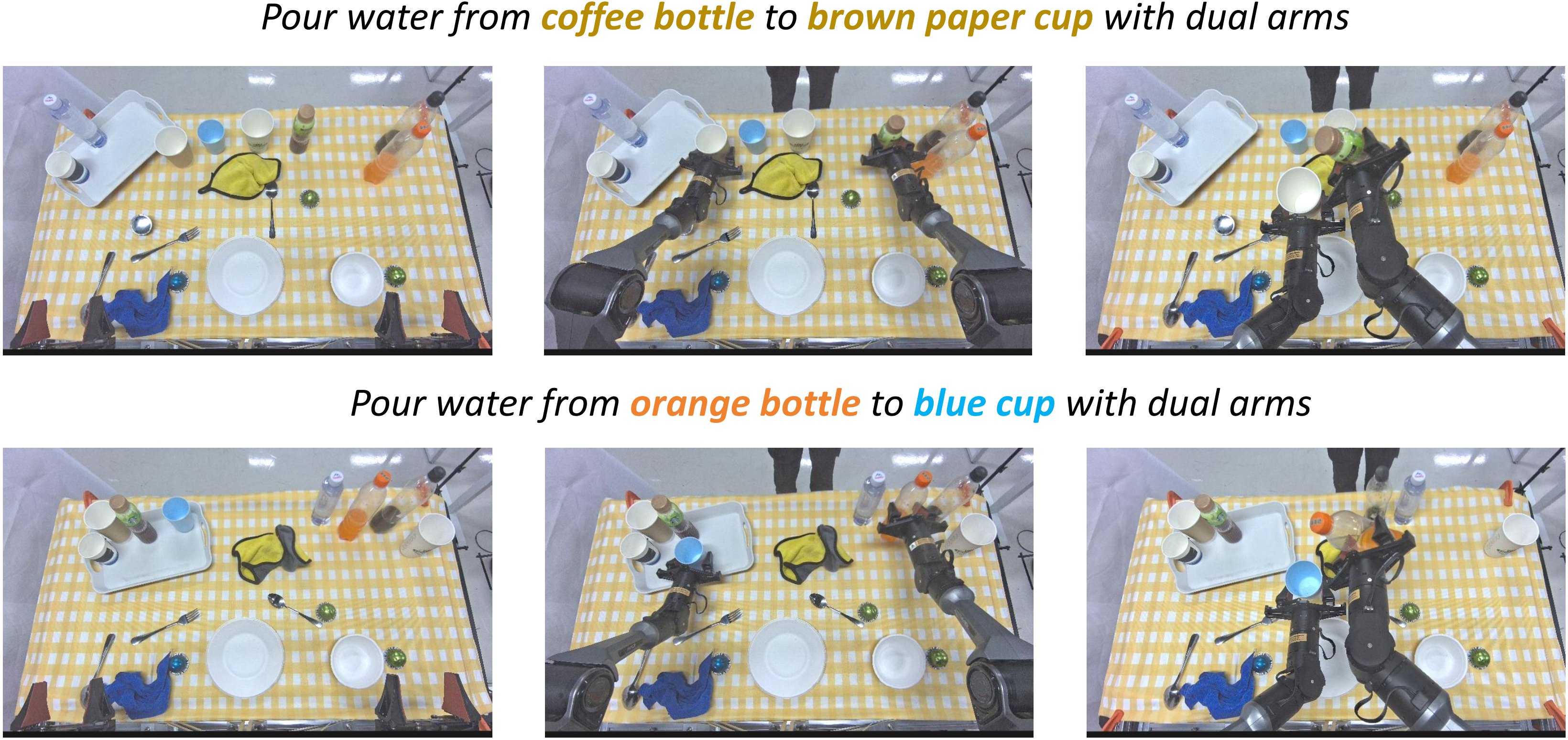
Real-world evidence.
Experiments across simulation and six real-world tasks show higher success rates and shorter execution
time than reactive recovery baselines.